
Gonzalo Bautista, Guillermo Maté, Raúl Martín, Miguel Martínez, Vicente Yagüe
Centro Español de Metrología

Resumen
El presente artículo explora la integración de las Unidades de Vuelo No Tripuladas (UAVs), o drones, en la vigilancia y control de la seguridad vial y el proceso de evaluación de la conformidad. Su gran versatilidad ha fomentado su rápida expansión a numerosos sectores, incluyendo la seguridad vial. El uso de drones ofrece ventajas significativas frente a los helicópteros, esta tecnología representa una evolución clave que optimiza recursos públicos y facilita el avance hacia un modelo de movilidad más moderno, inteligente y sostenible.
Palabras clave
Metrología, evaluación de la conformidad, dron, unidad de vuelo no tripulada, seguridad vial
Summary
This paper explores the integration of Unmanned Aerial Vehicles (UAVs), or drones, into road safety surveillance and control and the conformity assessment process. Their great versatility has led to their rapid expansion into numerous sectors, including road safety. The use of drones offers significant advantages over helicopters. This technology represents a key evolution that optimizes public resources and facilitates the transition to a more modern, intelligent, and sustainable mobility model.
Key words
Metrology, conformity assessment, drone, unmanned aerial vehicle, road safety
1. Introducción: la plataforma aérea no tripulada
Un dron, UAV (Unmanned Aerial Vehicle), por sus siglas en inglés, se define como aquella aeronave desprovista de piloto embarcado con capacidad de volar de forma autónoma o de ser controlada remotamente por un operador. La versatilidad que ofrece el uso de drones ha impulsado una rápida y amplia expansión hacia sectores de muy diversa índole. En el sector industrial, su uso abarca la agricultura de precisión (para monitoreo de cultivos, riego, fumigación y análisis de salud vegetal), la topografía y cartografía (para la generación de mapas 3D y seguimiento de obras), la inspección de infraestructuras (como líneas eléctricas, oleoductos o generadores eólicos), y la gestión ambiental (para el monitoreo de fauna, incendios forestales y contaminación). Dentro del ámbito militar y de emergencias, los UAVs son esenciales para la vigilancia y patrullaje, la búsqueda y rescate de personas en zonas de difícil acceso, y la evaluación rápida de daños tras desastres como terremotos o inundaciones. Su utilidad se extiende también a la investigación y la ciencia, donde facilitan estudios meteorológicos, la exploración geológica y el seguimiento de especies sin perturbar su hábitat. Dentro del sector público, los drones se han consolidado en el control de carreteras para la detección de infracciones en materia de seguridad vial.
2. Clasificación de infracciones y el control metrológico
La intervención de drones en la detección de infracciones de tráfico se clasifica en dos grandes categorías, según si el dispositivo está o no sujeto al control metrológico del Estado. Esta distinción se basa en si el dispositivo realiza una medición de velocidad (cinemómetro) o si se limita a recoger una evidencia basada en imagen de la situación.
Existen las infracciones captadas por dispositivos no sujetos a control metrológico, que engloban todas aquellas cuyo hecho imponible no está basado en una medición de velocidad. Dentro de este grupo de infracciones se encuentran el circular sin cinturón de seguridad, la no detención ante una señal de stop, el sobrepasar una línea continua y el circular en moto sin casco.
Por otro lado, se encuentran las infracciones captadas por dispositivos sujetos a control metrológico, donde el hecho imponible sí está basado en una medición de velocidad, como son las infracciones por exceso de velocidad. Los dispositivos incluidos en este grupo, denominados cinemómetros, requieren de forma obligatoria disponer de un certificado de examen de tipo (módulo B), un certificado de conformidad con el tipo (módulo F) y los certificados de verificación periódica y tras modificación o reparación, cuando sean aplicables. Más adelante se aborda el proceso de evaluación de la conformidad y la regulación aplicable.
3. Funcionamiento de los cinemómetros embarcados
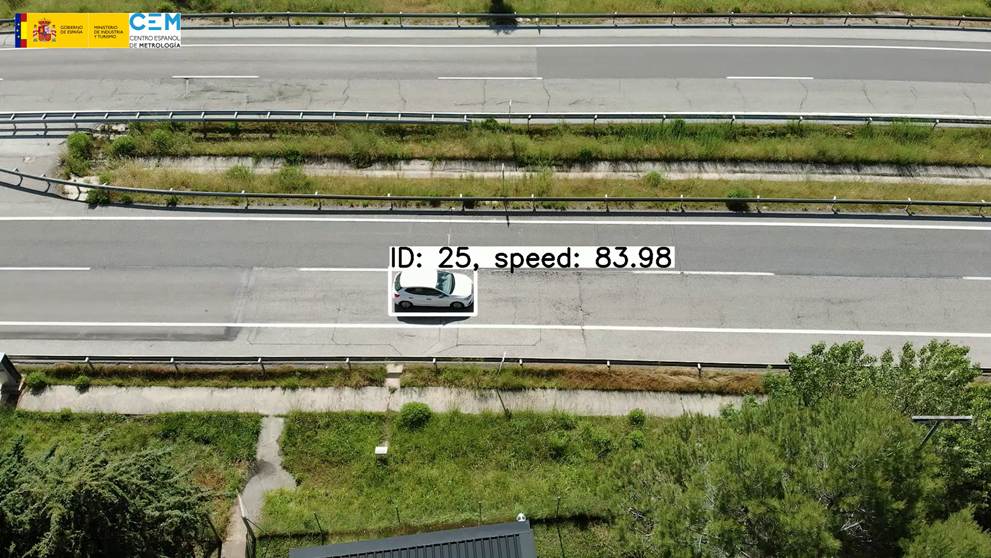
Los cinemómetros instalados en drones están diseñados para medir la velocidad de vehículos en movimiento al mismo tiempo que son capaces de identificarlos por medio de su matrícula. Para ello, el sistema captura los datos a través de dos instrumentos ópticos sincronizados (cámaras de video de alta definición) montados en el dron, el cual obtiene datos precisos de su posición provistos por una base cinemática en tiempo real (RTK).
El proceso se lleva a cabo de la siguiente manera: una de las cámaras graba un primer vídeo que aporta los datos para calcular las velocidades de múltiples vehículos de forma simultánea, utilizando algoritmos de visión artificial y cálculos matemáticos basados en el método de los mínimos cuadrados. La segunda cámara otorga la visual desde una perspectiva que permite registrar las matrículas de los vehículos circulantes. Posteriormente, el sistema aplica algoritmos para asociar los vehículos detectados por ambas cámaras. El dron, por su parte, aporta los datos de telemetría y GPS para disponer de la geolocalización de ambos vídeos. De esta forma, finalmente se consigue obtener un registro que contiene la velocidad, posición geográfica y matrícula identificadora del vehículo infractor.
4. Regulación aplicable y proceso de evaluación
4.1 Instrumentos sometidos a control metrológico
Para aquellos dispositivos considerados cinemómetros, el proceso de evaluación de la conformidad está regulado mediante el Real Decreto 244/2016, de 3 de junio, por el que se desarrolla la Ley 32/2014, de 22 de diciembre, de Metrología y la Orden ICT/155/2020, de 7 de febrero, por la que se regula el control metrológico del Estado de determinados instrumentos de medida.
El proceso de evaluación de la conformidad de cinemómetros en dron comienza con una solicitud oficial de módulo B por parte del fabricante. Una vez se dispone de esta solicitud se da inicio a las pruebas orientadas a determinar si el modelo de cinemómetro es apto para la medida de velocidad con fines sancionadores. El fabricante debe aportar la documentación técnica del instrumento para su evaluación administrativa y una vez esta información ha sido estudiada y considerada apta, se continúa con una evaluación del sistema informático del instrumento, que además del estudio documental, también incluye pruebas prácticas que afectan al software instalado en el equipo.
A continuación, el cinemómetro es sometido a diferentes perturbaciones electromagnéticas, térmicas, y de vibraciones en laboratorios altamente especializados con el objetivo de asegurar que la medida de velocidad no se vea afectada en condiciones de funcionamiento exigentes.

Cuando los ensayos de laboratorio han concluido y sus resultados resultan ser aptos, se procede a realizar la fase de ensayo del cinemómetro en carretera. En este punto, se despliega el cinemómetro bajo ensayo en una vía con tráfico real junto a otro cinemómetro que actúa como referencia. El objetivo es comparar las medidas de velocidad captadas por ambos equipos y comprobar que no se superan los errores máximos permitidos establecidos por la regulación aplicable.

Si los resultados en carretera son aptos, se procede a la emisión del certificado de módulo B.
Llegados a este punto, cabe resaltar el carácter pionero e innovador del Centro Español de Metrología en la certificación de cinemómetros en drones, ya que ha resultado ser la primera entidad emisora de un certificado de módulo B a este tipo de instrumentos.
Finalmente, para realizar la puesta en servicio de una unidad de cinemómetro en dron, la legislación aplicable establece que la única opción viable es la del módulo F. Es por ello, que el fabricante deberá realizar la solicitud correspondiente y la unidad que se desea poner en servicio será objeto de una evaluación administrativa y un examen metrológico, en el que se realizarán medidas de velocidad en laboratorio empleando simuladores especialmente desarrollados para el propósito y ensayos de medida de velocidad en tráfico real, de forma similar a lo descrito en los ensayos del módulo B. El proceso acaba con la emisión del certificado de módulo F.
4.2 Instrumentos no sometidos a control metrológico
A pesar de no existir una regulación de carácter metrológico aplicable a este tipo de instrumentos, la Dirección General de Tráfico ha publicado una serie de resoluciones a las que se acogen sus equipos no sometidos a control metrológico usados en el control de la seguridad vial. Dentro de estas resoluciones, la Resolución del Director General de Tráfico por la que se añade un Anexo a la Resolución de 1 de agosto de 2016 por la que se establecen los protocolos de certificación y los requisitos técnicos necesarios para los equipos de captación y reproducción de imágenes utilizados por la Dirección General de Tráfico para detectar infracciones a la normativa de tráfico, y que se encuentran fuera del ámbito del control metrológico del Estado, de fecha 20 de diciembre de 2018 es el documento aplicable a sistemas aéreos tripulados de forma remota orientados a la captación de imágenes que fundamenten la base de una posible sanción ante un comportamiento inadecuado respecto al código de circulación.
La evaluación de este tipo de sistemas implica un estudio administrativo de la documentación técnica de los equipos, así como un ensayo de software, en el que se analizan parámetros de encriptación del sistema, parámetros de geolocalización y parámetros cronométricos.

5. Ventajas comparativas frente al empleo de helicópteros
El uso de drones para el control de la seguridad vial presenta ventajas significativas respecto al empleo de helicópteros. En primer lugar, los drones tienen un menor coste operativo, pues su precio de adquisición es menor, y su mantenimiento y operación resultan más simples; a diferencia de los helicópteros, que requieren combustible, pilotos, mantenimiento intensivo y hangares.
En segundo lugar, ofrecen mayor flexibilidad y rapidez de despliegue; los drones pueden despegar desde casi cualquier lugar en minutos, mientras que los helicópteros necesitan infraestructura operativa de mayor calado que ralentiza su puesta en servicio. En tercer lugar, minimizan el riesgo humano dado que no llevan tripulación, eliminando riesgos en operaciones peligrosas o en condiciones adversas. En cuarto lugar, ofrecen una mayor maniobrabilidad y acceso, pues pueden volar bajo, entrar en zonas estrechas o de difícil acceso (como puentes o zonas urbanas), a diferencia de los helicópteros, que tienen limitaciones por tamaño. En quinto lugar, los drones aportan discreción ya que son más silenciosos y menos invasivos. Finalmente, originan un menor impacto medioambiental; los drones eléctricos no generan emisiones directas a la atmósfera, a diferencia de los helicópteros con motores de combustión, y los niveles de ruido generado por un dron son inferiores a los generados por un helicóptero.
6. Conclusiones
El empleo de drones en la vigilancia y control de la seguridad vial representa una evolución tecnológica significativa en la gestión del tráfico. Su capacidad para operar de forma remota, rápida y eficiente permite una supervisión más precisa de las carreteras, lo cual es especialmente valioso en zonas de difícil acceso o con alta siniestralidad. En conjunto, la integración del uso de drones en la gestión de la seguridad vial optimiza los recursos públicos y permite avanzar hacia un modelo de movilidad más moderno, inteligente y sostenible.






Comentarios