
Pascual Simón Comín, Javier López Ríos, Tomás García Aguado
(LCOE, Laboratorio Central Oficial de Electrotecnia de la F2i2)

Resumen
El 28 de abril de 2025 toda la península Ibérica sufrió una crisis eléctrica sin precedentes, un apagón que puso de manifiesto la extrema importancia de la electricidad, ya que sin electricidad casi nada funciona, la actividad normal se paraliza y pueden sobrevenir accidentes y situaciones de emergencia. Desde entonces el gobierno y los operadores implicados han puesto en marcha distintas medidas técnicas y legislativas para mejorar la resiliencia, robustez y estabilidad del sistema eléctrico.
Dentro de estas iniciativas cobra especial interés la metrología de ciertas variables representativas del sistema eléctrico, tanto para su explotación normal como para monitorizar y analizar los posibles incidentes en régimen perturbado. Por ejemplo, el proyecto de real decreto del Ministerio para la transición ecológica, actualmente en tramitación, establece medidas urgentes para el refuerzo del sistema eléctrico y mandata al operador del sistema para que proponga en un plazo de seis meses los requisitos técnicos necesarios para que los sistemas de monitorización mejoren sustancialmente el análisis de incidentes y los registros de faltas y perturbaciones en el sistema.
Entre otras medidas, la progresiva sustitución de relés de protección, incapaces de realizar varias lecturas por segundo, por sistemas de medida sincronizados con alta velocidad de lectura, permitirá mejorar la explotación y seguridad del sistema eléctrico. Para garantizar la estabilidad transitoria de un sistema eléctrico se requiere información en tiempo real de la evolución de todas las variables, medidas de tensiones, corrientes, potencias activas y reactivas o frecuencia en distintos nudos del sistema que deben estar sincronizadas y ser suficientemente rápidas, siendo aconsejable disponer como mínimo de 50 medidas por segundo, es decir, una por cada período de la corriente eléctrica.
Este artículo presenta cómo se realizan las medidas de estas variables en los nudos del sistema eléctrico, y evidencia su enorme importancia, no tan solo para el análisis de incidentes, sino también para un adecuado control del sistema eléctrico, abarcando desde las centrales de generación a la red de transporte y pasando por la red de distribución.
Abstract
On April 28, 2025, the entire Iberian Peninsula suffered an unprecedented power crisis, a blackout that highlighted the extreme importance of electricity, since almost nothing works without it, normal activity is paralyzed, and accidents and emergency situations can occur. Since then, the government and the operators involved have implemented various technical and legislative measures to improve the resilience, robustness, and stability of the electrical system.
Within these initiatives, the metrology of certain representative variables of the electrical system is of particular interest, both for its normal operation and for monitoring and analyzing possible incidents in a disturbed regime. For example, the draft royal decree from the Ministry for the Ecological Transition, currently being processed, establishes urgent measures for strengthening the electrical system and mandates the system operator to propose, within a period of six months, the necessary technical requirements for monitoring systems to substantially improve incident analysis and the recording of faults and disturbances in the system.
Among other measures, the progressive replacement of protection relays, which are incapable of taking several readings per second, with synchronized measurement systems featuring high reading speed, will allow for improved operation and security of the electrical system. Guaranteeing the transient stability of an electrical system requires real-time information on the evolution of all variables—measurements of voltages, currents, active and reactive powers, or frequency at different system nodes—which must be synchronized and sufficiently fast. It is advisable to have a minimum of 50 measurements per second, that is, one for each period of the electrical current.
This article presents how these variables are measured at the nodes of the electrical system and demonstrates their enormous importance, not only for incident analysis but also for adequate control of the electrical system, encompassing everything from generation plants to the transmission network and including the distribution network.
Palabras clave
Metrología, crisis eléctrica, apagón, estabilidad del sistema eléctrico, análisis de incidentes, relés de protección, sistemas de medida sincronizados, estabilidad transitoria. Variables eléctricas, red de transporte y distribución.
Key words
Metrology, power crisis, blackout, electrical system stability, incident analysis, protection relays, synchronized measurement systems, transient stability, electrical variables, transmission and distribution network.
1. Introducción
Cuando se habla de metrología, el mayor interés lo suscita casi siempre la metrología legal que mide la cantidad de producto suministrado, por ejemplo, el consumo de energía eléctrica de un hogar a lo largo de un mes o el consumo durante la carga rápida de un vehículo eléctrico, con unidades de \(kW\cdot h\). En el sistema eléctrico es necesario medir la energía intercambiada a través de los denominados puntos frontera, es decir, la consumida por hogares e industrias, la entregada por un generador a la red, la intercambiada entre las redes de distribución y las redes de transporte y la intercambiada en las conexiones internacionales. La normativa [1], [2], [3] regula cómo deben hacerse estas medidas, utilizando contadores eléctricos y en su caso transformadores de medida de alta o baja tensión sujetos a reglamentación de metrología legal y a normas internacionales bien definidas que aseguran la exactitud de las medidas tanto en condiciones de referencia (ideales) como en condiciones más extremas de temperatura, o incluso perturbadas, con presencia de armónicos, vibraciones o campos electromagnéticos.
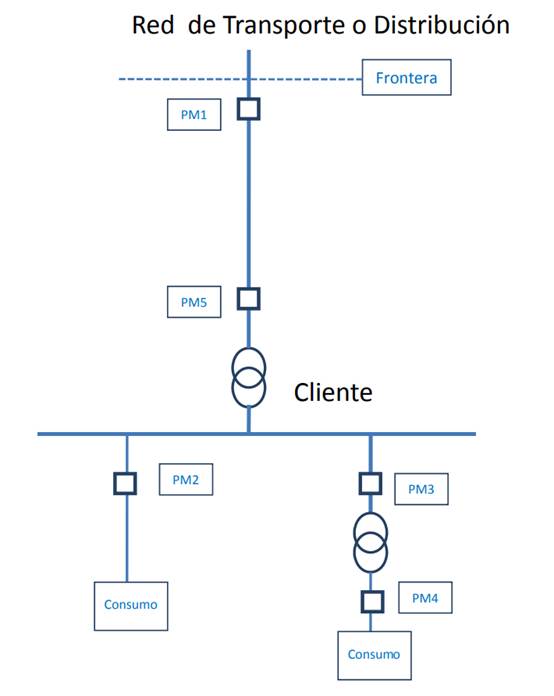
En la figura 1 se representa un ejemplo de esquema unifilar de la instalación de un gran consumidor (cliente) conectada a la red de transporte o distribución de alta tensión. La medida principal se colocaría en el punto 1, PM1, aunque pueden existir otros puntos de medida adicionales para verificar la medida. Por ejemplo, la suma de la medición de energía en PM5 más las pérdidas en la línea que une PM1 y PM5 debería coincidir con la medición en PM1, mientras que la suma de PM2 y PM3 más las pérdidas en el transformador elevador de cliente debería coincidir con la medición en PM5.
Puesto que la energía es la potencia acumulada a lo largo del tiempo, matemáticamente se define como la integral de la potencia activa en un tiempo determinado. Para medir energía no es relevante prestar una atención especial a lo que suceda durante los transitorios por ejemplo durante un cortocircuito o una sobretensión de muy corta duración, ya que su influencia en la energía medida a lo largo de un período de integración amplio (un mes o al menos 15 minutos), será totalmente despreciable.
Sin embargo, para el control y operación del sistema eléctrico es conveniente disponer de lecturas de las variables del sistema con una frecuencia mucho mayor, por ejemplo, una cada 20 ms. Este artículo se centra en estas mediciones mucho más rápidas, necesarias para la operación y control del sistema eléctrico.
A medida que el sistema energético europeo experimenta una transformación sin precedentes para descarbonizar la economía y reducir la dependencia energética exterior, surgen diversos retos. Entre ellos se incluyen la integración a gran escala de plantas eólicas y fotovoltaicas (FV) mediante inversores avanzados para garantizar la estabilidad en un sistema dominado por las renovables, y sistemas de almacenamiento de energía de alta capacidad, esenciales para absorber el exceso de energía y mantener la estabilidad de la red.
Para gestionar con precisión un flujo de energía altamente sensible a través de la red eléctrica europea y garantizar el equilibrio crítico entre la energía generada y las cargas locales, se requieren medidas en tiempo real con la exactitud adecuada así como canales de comunicación resilientes como requisito previo para el control inteligente y automatizado de la misma.
La información subyacente para este control proviene de una red de transformadores, sensores e instrumentos de medida, es decir de una columna vertebral metrológica que permite observar la red. Las mediciones de las condiciones relevantes de la red deben ser rápidas, sincronizadas y deben tener la exactitud adecuada.
Una metrología de alta calidad garantiza la fiabilidad de estas mediciones, lo que permite la toma de decisiones en tiempo real y el control predictivo. El procesamiento de esta enorme cantidad de datos de medición tiene un potencial enorme para mejorar la eficiencia de los flujos de potencia por la red.
La actual penetración de las energías renovables y su previsible incremento en las próximas décadas exige reforzar la capacidad de la red. Esto implicará la integración de nuevos componentes en las redes de transporte, distribución o en las subestaciones de los grandes consumidores de electricidad. Se trata de condensadores síncronos, sistemas electrónicos de compensación de reactiva STATCOM o sistemas de almacenamiento de energía con baterías conectados a través de convertidores electrónicos. La instalación en ciertos nudos de la red de estos sistemas mejorará el control de la potencia reactiva inyectando la reactiva inductiva o capacitiva necesaria en cada momento para conseguir el control dinámico de la tensión y que la tensión se mantenga dentro de los límites de tolerancia admisibles para una explotación segura del sistema eléctrico y para poder garantizar el nivel de aislamiento de sus componentes (transformadores, líneas, cables y aparamenta eléctrica).
Los ensayos y calibración robustas de estos sensores y equipos de medida basados en normas metrológicas reconocidas internacionalmente son esenciales para garantizar la interoperabilidad, la seguridad y la confianza. Se requieren normas de vanguardia, adaptadas a su propósito y aceptadas globalmente, que a su vez refuercen la competitividad de los fabricantes europeos de estos componentes. En este contexto, la metrología, la ciencia de las mediciones, no es solo un facilitador técnico, sino también un activo estratégico. Garantizar mediciones precisas, armonizadas y confiables es esencial para permitir la funcionalidad de la red inteligente, respaldar la innovación y mejorar la competitividad y el liderazgo de Europa en la transición global hacia la energía limpia.
Estas medidas deben tener la exactitud y velocidad de lectura adecuadas, realizarse en un número suficiente de los nudos de la red y en los distintos niveles de tensión y deben transmitirse de forma rápida, sincronizada y fiable a los centros de control y finalmente al operador del sistema. Constituyen la base fundamental de los sistemas de protección, regulación, control y operación del sistema eléctrico, tanto si nos referimos a sistemas automáticos como a los no automáticos.
2. Transformadores y sensores de medida
Los contadores, los relés de protección o los instrumentos que miden las variables del sistema eléctrico como sincrofasores, no pueden conectarse directamente con la alta tensión, por lo que son necesarios transformadores o más modernamente sensores que reduzcan las altas tensiones a niveles de baja tensión (generalmente ≤ 100 V), o que reduzcan las altas corrientes a corrientes más pequeñas (generalmente ≤ 5 A) y que además interpongan un aislamiento seguro entre el circuito de alta tensión y el de baja tensión en el que se conecta el equipo de medida.
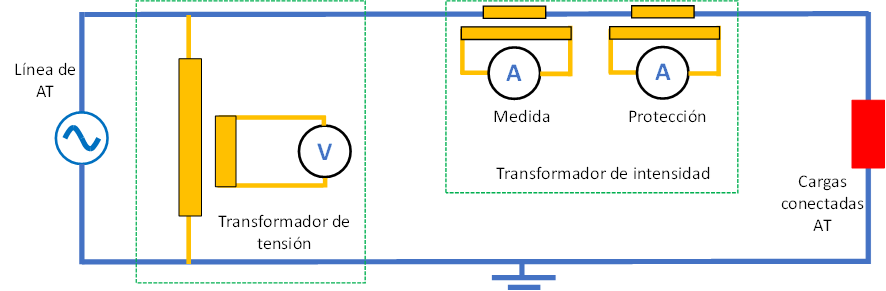
Aunque en la realidad los circuitos son trifásicos, en la figura 2 se simplifica con representación monofásica la conexión de equipos de medida con las funciones de voltímetro o amperímetro mediante transformadores de medida o protección de tensión y corriente respectivamente.
Por consiguiente, estos transformadores y sensores deben tener dos propiedades básicas, por una parte, deben garantizar el aislamiento entre el lado de alta tensión y el lado de baja tensión y por otra deben reflejar fielmente en el lado de baja tensión el valor de tensión o de corriente medido en el lado de alta tensión, a una escala menor y con un error de medida muy pequeño.
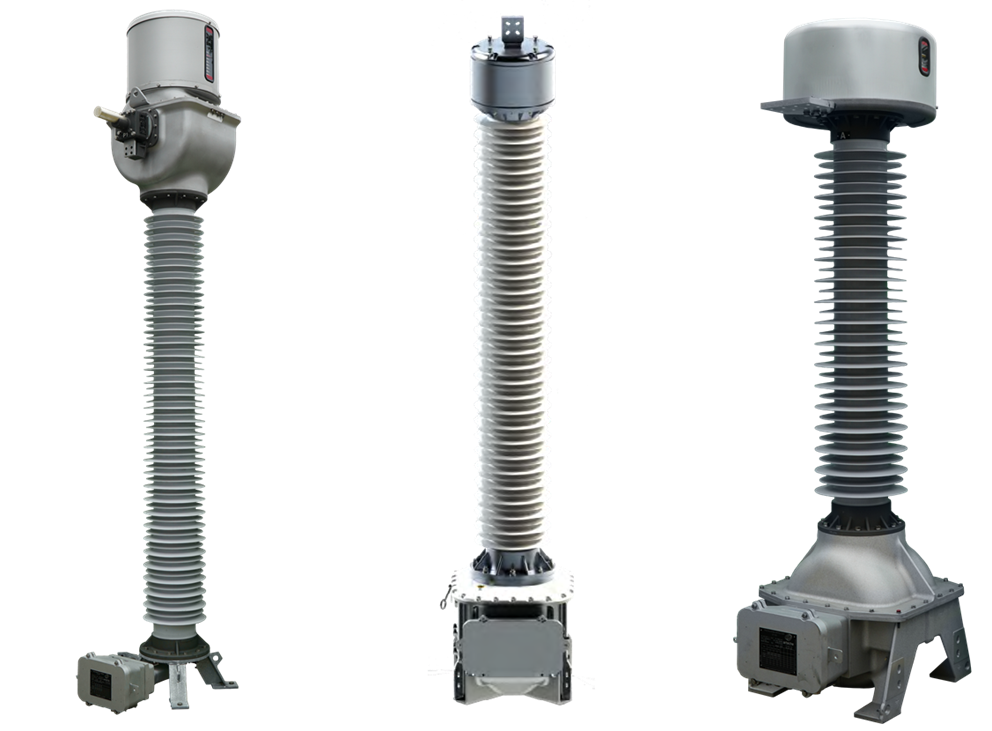
Los transformadores de tensión y de intensidad pueden ser de medida o de protección según que en su secundario se conecten equipos de medida como contadores o equipos de protección como relés. Tradicionalmente el principio de funcionamiento de estos transformadores era inductivo o en todo caso para algunos tipos de transformadores de tensión capacitivo. Actualmente se fabrican sensores que responden a otros principios físicos de funcionamiento y de diseño, por ejemplo, los transformadores de intensidad ópticos o los divisores de tensión resistivo-capacitivos. Existe un reglamento en España que regula las características de seguridad de estos equipos [4], igualmente numerosas normas internacionales de obligado cumplimiento en España según el reglamento anterior [5], [6], [7], [8] y [9] que establecen requisitos constructivos y los ensayos que deben satisfacer, tanto si se trata de ensayos de tipo para calificar el diseño, como individuales o de rutina para calificar la fabricación. En la figura 3 se presenta una fotografía de estos tipos de transformadores.
Estos transformadores de medida deben disponer de las verificaciones en origen y sistemáticas que marca la reglamentación [2] para poder garantizar la trazabilidad metrológica de las medidas que se realizan durante su vida útil. El Laboratorio Central Oficial de Electrotecnia, LCOE, es el laboratorio asociado al Centro Español de Metrología y designado dentro de EURAMET para dar trazabilidad metrológica a las medidas de alta tensión y de alta corriente alterna en España, ya que custodia los patrones nacionales de estas magnitudes.
3. El sistema eléctrico y los fasores
Para comprender mejor el funcionamiento del sistema eléctrico se suele recurrir a la analogía con una bicicleta tipo tándem sobre la que pedalean numerosos ciclistas [10]. El objetivo del tándem es mover la bicicleta por la carretera y sin perder el equilibrio, lo cual tiene su complicación ya que son muchas las personas montadas en la bicicleta.
Todos los ciclistas pedalean en sincronismo, al unísono, (a los 50 Hz de la red) al estar las bielas de sus pedales unidas por una cadena. Unos ciclistas dan pedales con energía, son los generadores, mientras que otros simplemente dejan que sus pies sean arrastrados por los pedales, no pedalean, o incluso frenan intencionadamente, serían las cargas del sistema eléctrico. Si la carretera es plana y existe un equilibrio entre los generadores y las cargas, la bicicleta adquiere una velocidad constante, si los ciclistas generadores imprimen mayor potencia la bicicleta se acelera, si las cargas aumentan su frenada la bicicleta se ralentiza. Lo mismo le sucede al sistema eléctrico que para mantener la frecuencia en 50 Hz tiene que mantener un equilibrio entre generación y demanda. Si la generación aumenta o disminuye la demanda, la frecuencia sube y, si la generación disminuye o la demanda aumenta, la frecuencia baja. Lo que amortigua estas variaciones de velocidad o frecuencia es la inercia de la bicicleta, o sea la inercia de las grandes masas rodantes de las turbinas y alternadores de un sistema eléctrico.
Si se observan con detalle las bielas de los pedales, cuando un ciclista tiene su biela abajo, el resto de los ciclistas las tienen también abajo, es decir, tienen el mismo ángulo. Si pusiéramos una lupa, se podrían apreciar ligeros desfases, ya que la cadena de la bicicleta no es rígida totalmente y permite estos desfases entre sus posiciones. La diferencia de ángulo entre las bielas de los ciclistas representa las diferencias en los ángulos de las tensiones en los nudos de un sistema eléctrico, que no deben ser muy grandes si se quiere mantener el sistema estable. Si estas diferencias de ángulo varían, se pueden producir oscilaciones o tirones en la marcha de la bicicleta.
Cuando el tándem funciona como un equipo, todos los ciclistas están erguidos. La posición de cada ciclista representa la magnitud de las tensiones en los nudos del sistema. Todos los ciclistas en posición vertical representan un sistema eléctrico equilibrado con tensiones en los nudos iguales a su valor nominal o 1,0 por unidad. Sin embargo, los ciclistas pueden inclinarse o desplazar ligeramente la posición de su sillín, bien a la derecha, bien a la izquierda, este desplazamiento representaría la presencia de una reactiva inductiva para un desplazamiento digamos a la izquierda o capacitiva para un desplazamiento a la derecha. Estos desplazamientos laterales no permiten aplicar más potencia a la bicicleta, pero lo más importante es que, si hay muchos ciclistas desplazados a la derecha y pocos a la izquierda, o viceversa, la bicicleta se cae, es decir, la reactiva inductiva y capacitiva tienen que estar equilibradas para mantener el equilibrio de la bicicleta.
En el sistema eléctrico, un exceso de reactiva inductiva disminuye las tensiones y un exceso de capacitiva las incrementa, incluso fuera de límites, lo que puede desencadenar, por efecto dominó, un cero eléctrico o apagón.

Las magnitudes principales de un sistema eléctrico son las tensiones en sus nudos y las corrientes que circulan entre estos nudos, las corrientes que inyectan los generadores y las que consumen las cargas, sin olvidar la frecuencia eléctrica. Como el sistema es trifásico, en una subestación habría que medir las tres tensiones en barras y las tres corrientes por cada una de las líneas que llegan o salen de la subestación y por las salidas a cada uno de los transformadores que se conecten a sus barras.
Las tensiones y las corrientes en un sistema eléctrico de potencia tienen forma sinusoidal, con una frecuencia, en Europa, de 50 Hz, o lo que es lo mismo, con un período de repetición de 20 ms.
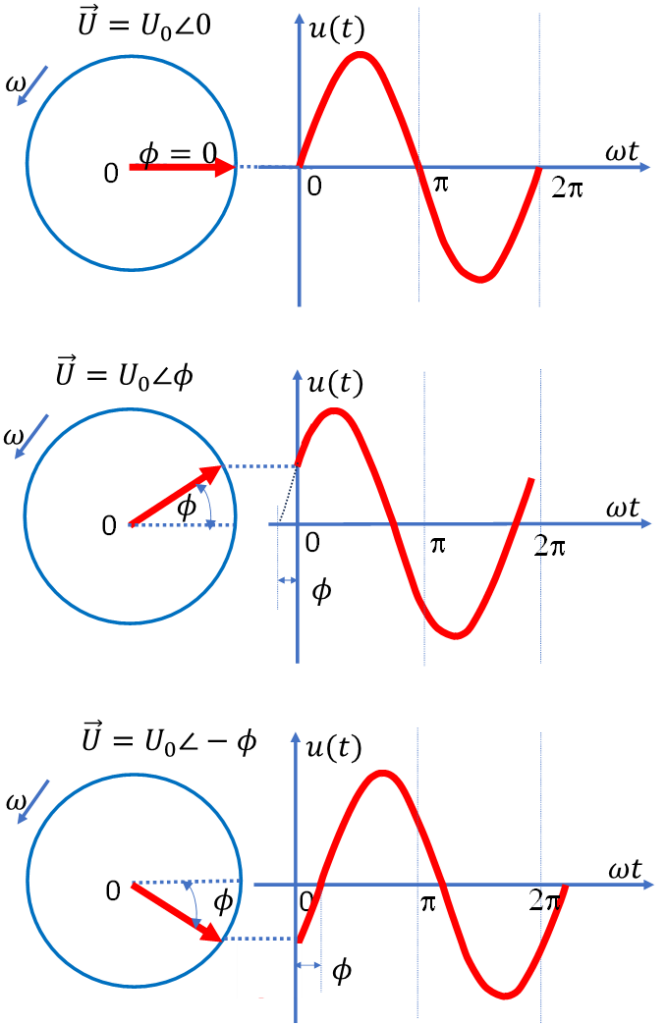
Para representar las tensiones y corrientes del sistema eléctrico se utilizan fasores que simplifican el análisis de circuitos en corriente alterna, ya que su uso convierte las ecuaciones diferenciales en algebraicas y facilita enormemente los cálculos. En lugar de describir la señal con su variación en el tiempo tal y como se vería en un osciloscopio, el fasor representa sus dos características principales: su magnitud (amplitud) y su ángulo de fase utilizando vectores giratorios en el plano complejo. La longitud del fasor representa la amplitud de la tensión o corriente, mientras que el ángulo del fasor respecto de un eje horizontal indica el desfase de la tensión o corriente respecto de un origen de tiempo arbitrario. El fasor gira en sentido antihorario a una velocidad angular que se puede calcular en función de la frecuencia como: \(\omega = 2\cdot \pi\cdot f\), en unidades rad/s.
En la figura 5 se dibujan tres fasores de tensión con ángulos de fase distintos junto con las ondas sinusoidales que representan. Se puede apreciar cómo el valor instantáneo de la tensión se obtiene proyectando el vector giratorio en el eje vertical.
Como se explicará más adelante, el concepto de fasor es el utilizado para definir las unidades de medida fasoriales, PMU (“phase measurement units”), también denominadas sincrofasores, que representan los fasores del sistema eléctrico (tensiones y corrientes) de forma sincronizada mediante una señal de tiempo común a todos ellos.
La utilización de fasores facilita la comprensión del funcionamiento de los sistemas eléctricos de potencia, incluidos ciertos aspectos críticos, como puede ser el control de la tensión mediante los flujos de potencia reactiva por las líneas.
En la figura 6 se representa un sistema de potencia básico formado por un generador ideal en el nudo \(A\), capaz de mantener la tensión en su valor nominal, que alimenta a una carga conectada en el nudo \(B\), ambos nudos están unidos por una línea de transmisión que se puede representar por una inductancia, \(X\), despreciando las pérdidas y capacidad de la línea. La carga consume una potencia activa, \(P\), sin consumir reactiva y además existe un sistema de control de la tensión en el nudo \(B\) que permite mantener la tensión también en el valor nominal de 1,0 por unidad igual que en el nudo \(A\).
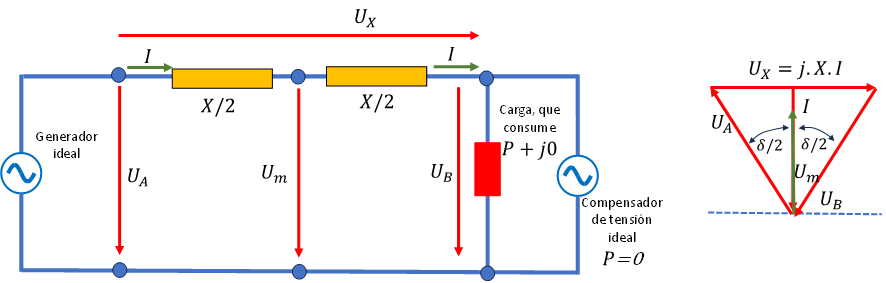
El diagrama vectorial sirve para ilustrar cómo la potencia activa fluye siempre desde el nudo cuya tensión está más adelantada, nudo A, hacia el nudo donde la tensión está más retrasada, o sea al nudo B, siguiendo la siguiente expresión básica que se puede encontrar en la bibliografía [11], donde la tensión U representa el módulo de la tensión en el nudo A y en el nudo B, ya que en este caso son iguales en ambos nudos. El ángulo \(\delta\) es el desfase entre la tensión en el nudo \(A\) y el \(B\)
\(P=\frac{U^2}{X}\cdot\sin{\delta}\hspace{1cm} (1)\)
Por otra parte, haciendo uso del diagrama fasorial, también puede apreciarse cómo la tensión en el punto medio de la línea, \(U_{m}\), será inferior a la tensión en los nudos \(A\) y \(B\), y que cuanto más larga sea la línea (mayor valor de \(X\) o cuanta más potencia activa consumiera la carga, más pequeña será la tensión en el punto medio, aspecto importante a controlar ya que fácilmente podría alcanzar valores no admisibles. En efecto, según la fórmula (1), para incrementar la potencia activa transmitida se tiene que aumentar el ángulo, \(\delta\) , sin exceder el límite de \(\frac{\pi }{2}\) y al estar más abiertos los fasores de las tensiones en \(A\) y \(B\), más pequeña resultará la tensión en el punto medio (ver diagrama fasorial).
Es fácil demostrar analíticamente que el valor de la tensión en el punto medio sigue la expresión (2), que explica lo anterior analíticamente:
\(U_m=\frac{U^2}{X}\cdot\left(1-\cos{\delta}\right)\hspace{1cm} (2)\)
Este sencillo ejemplo pone de manifiesto la utilidad de los fasores para entender el funcionamiento de los sistemas eléctricos de potencia y nos prepara también para apreciar la importancia del conocimiento de los ángulos de desfase de las tensiones en los nudos, lo que precisamente puede medirse mediante los sincrofasores.
4. Sincrofasores o dispositivos PMU
Cualquier onda senoidal en el dominio del tiempo, \(x\left ( t \right )\), generalmente una tensión o una corriente, se puede definir por la ecuación siguiente, donde \(X_{m}\) es el valor de pico de la señal, \(\theta\) representa la posición angular de la señal en radianes y \(D\left ( t \right )\) representa una señal perturbadora formada por armónicos, ruido, offset y otras interferencias.
\(x\left(t\right)=X_mcos\left[\theta\left(t\right)\right]+D\left(t\right)\hspace{1cm}(3)\)
La fase del sincrofasor se define como la diferencia de fases entre la posición angular de la señal y la fase que correspondería según la frecuencia nominal, \(f_0\).
\(\phi\left(t\right)=\ \theta\left(t\right)-2\pi f_0t\hspace{1cm}(4)\)
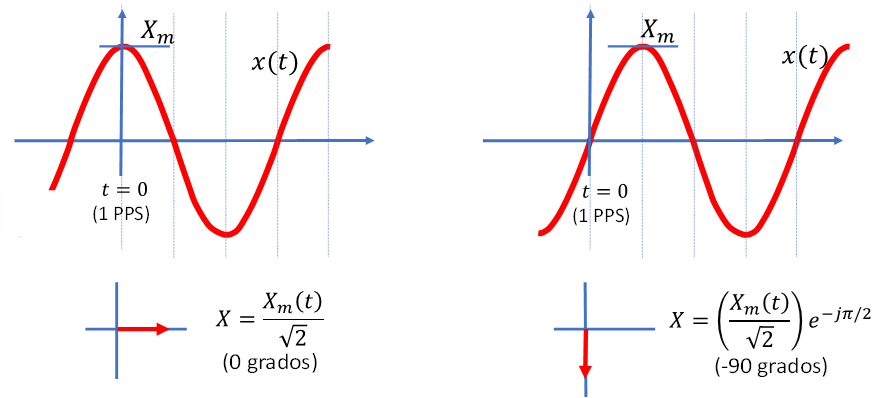
La representación con fasores de la señal, utilizando la función coseno, sería:
\(X\left(t\right)=\left(\frac{X_m\left(t\right)}{\sqrt2}\right)e^{j\phi}=\left(\frac{X_m\left(t\right)}{\sqrt2}\right)\left(cos\phi\left(t\right)+jsen\phi\left(t\right)\right)=X_r\left(t\right)+jX_i\left(t\right)
\hspace{1cm}(5)\)
Los dos parámetros característicos del fasor son su magnitud, que coincide con el valor eficaz de la señal, \(\left(\frac{X_m\left(t\right)}{\sqrt2}\right)\), y su fase, \(\phi\left(t\right)\). Para realizar cálculos con fasores todos ellos deben tener la misma escala de tiempos y estar referidos a la misma frecuencia \(f_0\).
Un sincrofasor, \(X\left(t\right)\), se define por tanto como el número complejo siguiente, donde tanto su módulo como su argumento o fase pueden variar con el tiempo.
\(X\left(t\right)=\left(\frac{X_m\left(t\right)}{\sqrt2},\phi \left(t\right) \right) \hspace{1cm}(6)\)
El ángulo de fase de un fasor tradicional es una medida relativa que depende de una referencia temporal local y arbitraria. Por lo tanto, no se pueden comparar directamente los fasores de dos ubicaciones geográficas distintas, ya que sus ángulos de fase no comparten una referencia común. Un sincrofasor es un fasor sincronizador, por lo que \(\phi\left(t\right)\) representa el desplazamiento del valor máximo de la señal respecto de una referencia temporal sincronizada con el tiempo UTC (Tiempo Universal Coordinado) que es el principal estándar de tiempo mundial. El tiempo UTC se utiliza para sincronizar los relojes de todo el mundo y es la base del tiempo civil y del huso horario.
Para \(t=0\), la función coseno tiene su máximo para un ángulo \(\phi=0\), mientras que cuando la señal pasa por cero en sentido creciente el ángulo es \(\phi=90^{\circ}\) o en radianes, \(\phi=-\pi/2\).
La referencia temporal es una señal de un pulso por segundo (1 PPS) captada generalmente a través de un receptor GPS (Sistema de Posicionamiento Global) que a su vez obtiene la señal de 24 satélites en órbita. El receptor GPS utiliza esta información para sincronizar su propio reloj interno con el tiempo (UTC) de forma que se garantice la trazabilidad metrológica. Una vez que el reloj interno del sincrofasor está sincronizado, genera una señal eléctrica de 1 PPS.
La exactitud de la señal 1 PPS es crítica para una medida correcta con sincrofasores, ya que permite la sincronización de mediciones en diferentes ubicaciones geográficas. Generalmente su exactitud es mejor de 1 microsegundo. Sin esta referencia de tiempo común y exacta, no sería posible comparar las fases de las tensiones, corrientes y frecuencias en diferentes puntos de la red eléctrica que incluso están en países distintos, lo que haría inútil la tecnología de sincrofasores para la monitorización y control de redes a gran escala.
El laboratorio del Real Instituto y Observatorio de la Armada en San Fernando (ROA), es el laboratorio asociado al Centro Español de Metrología en el campo metrológico del tiempo y de la frecuencia que mantiene el patrón nacional de la unidad básica de tiempo (el segundo) y la escala de Tiempo Universal Coordinado UTC(ROA), es, por tanto, el laboratorio español encargado de la trazabilidad metrológica de las medidas de tiempo.
La frecuencia de la señal no se mantiene constante e igual a 50 Hz, sino que variará en mayor o menor medida. Los sincrofasores sirven para conocer tanto la frecuencia a lo largo del tiempo como la velocidad de variación de la frecuencia o ROCOF:
\(f\left(t\right)=\frac{1}{2\pi}\frac{d\theta\left(t\right)}{dt}=f_0+\frac{1}{2\pi}\frac{d\left[\phi\left(t\right)\right]}{dt} \hspace{1cm}(7)\)
\(ROCOF\left(t\right)=\frac{df\left(t\right)}{dt}=\frac{1}{2\pi}\frac{d^2\theta\left(t\right)}{dt^{2}}=\frac{1}{2\pi}\frac{d^2\left[\phi\left(t\right)\right]}{dt^{2}} \hspace{1cm}(8)\)
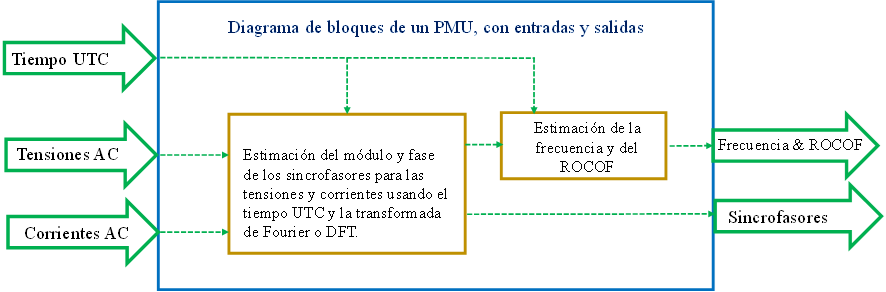
En la figura 8 se representa un diagrama de bloques del funcionamiento de un sincrofasor.
La velocidad de muestreo de los sincrofasores varía habitualmente entre 12 y 128 muestras por ciclo. Si la velocidad de muestreo es muy rápida, se mejora la exactitud, pero se requiere mucha más capacidad de computación. La lectura del valor del sincrofasor en módulo, argumento, frecuencia y ROCOF se actualiza generalmente una vez por período de la señal, es decir 50 veces por segundo lo que es lo mismo cada 20 ms, aunque también están admitidas velocidades de lectura menores y mayores: 10, 25 o 100 lecturas por segundo para sistemas de 50 Hz. No es posible una velocidad de lectura mayor de 100 lecturas por segundo ya que hace falta medio ciclo de la señal de 50 Hz para obtener el valor eficaz de la tensión o la corriente.
Otro parámetro importante en el funcionamiento de los sincrofasores es la latencia o tiempo de retraso entre el momento en que se muestrea la forma de onda y el momento en que el valor calculado del sincrofasor está disponible. Es un factor crítico porque afecta a la capacidad del operador para reaccionar a los eventos en tiempo real. Una latencia demasiado alta puede llevar a que los datos de la red estén desactualizados en el momento de utilizarse, lo que podría llevar a decisiones de control erróneas o tardías. En un sistema eléctrico, donde los eventos pueden ocurrir en milisegundos, una latencia de incluso una fracción de segundo puede tener una importancia significativa. Por ejemplo, un sistema de protección que utiliza datos de PMU para detectar y aislar faltas rápidamente requiere la menor latencia posible para evitar daños en los equipos y evitar la inestabilidad del sistema.
Las normas [13] y [14] definen múltiples parámetros para calificar los PMU, por ejemplo, el Error Vectorial Total (TVE) y establecen también las clases de exactitud como la Clase P (Protección) y la Clase M (Medición).
La clase P está diseñada para aplicaciones que necesitan una respuesta rápida y una latencia mínima, priorizando la velocidad de lectura sobre el filtrado extenso. La norma no exige un filtrado explícito para esta clase. Las aplicaciones para esta clase incluyen la protección contra pérdida de sincronismo, la detección de operación en isla y la protección y control de área amplia.
La clase M está diseñada para aplicaciones que requieren la máxima exactitud en la medición. Los dispositivos de Clase M permiten un filtrado más extenso para mejorar la exactitud y el rechazo de ruido, lo que puede implicar una mayor latencia. Las aplicaciones para esta clase son entre otras la monitorización de la calidad de la energía, la estimación de estado sin necesidad de recurrir a simulaciones con modelos matemáticos y el análisis de estabilidad angular y de tensión.
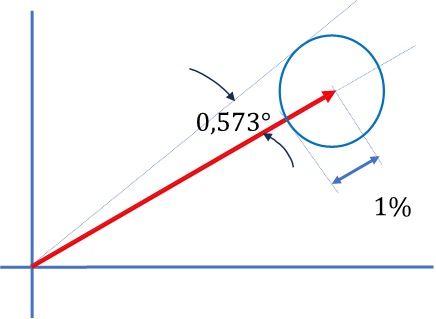
El TVE unifica los errores de magnitud, ángulo de fase y sincronización del tiempo en un único número, comparando el fasor medido con el fasor teórico o ideal. Este enfoque permite a los fabricantes usar cualquier algoritmo que lleve a resultados dentro de los límites de exactitud especificados. El valor del TVE de un PMU se determina mediante su calibración.
La norma [13] establece un límite de exactitud del 1% TVE para condiciones de estado estacionario, tal y como se representa en la figura 9, donde el vector dibujado representa el valor ideal o valor patrón del sincrofasor de modo que si todas las medidas del PMU bajo calibración se encuentran dentro del círculo marcado se puede afirmar que el PMU cumple con un TVE del 1%. La figura muestra un diámetro exagerado para el círculo para mayor claridad. La norma establece otras pruebas complementarias para evaluar la exactitud de los sincrofasores en condiciones dinámicas.
En la figura 10 se puede apreciar un sincrofasor comercial de configuración modular, previsto para diferentes aplicaciones, como aplicaciones industriales, de generación, transporte o distribución de energía.

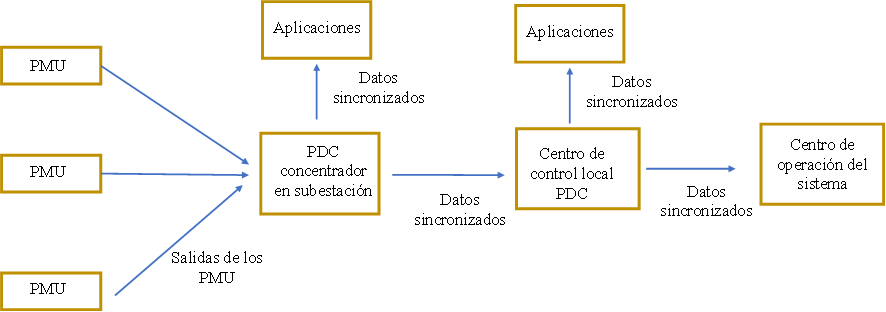
Para caracterizar correctamente el funcionamiento del sistema eléctrico, los sincrofasores deben funcionar en red, tal y como se muestra en la figura 11. Por ejemplo, una subestación puede requerir de varios PMU que envían la información a un concentrador de datos o PDC que está en la misma subestación, esta función puede residir en un equipo concreto o puede ser un software en un servidor u ordenador. Varios PDC, incluso de compañías eléctricas o plantas generadoras diferentes, pueden agregar un conjunto muy extenso de datos de tensiones, corrientes, frecuencia y enviarlos a otro centro de control o PDC. Por último, los datos de estos centros de control locales pueden enviarse al centro de control del operador del sistema.
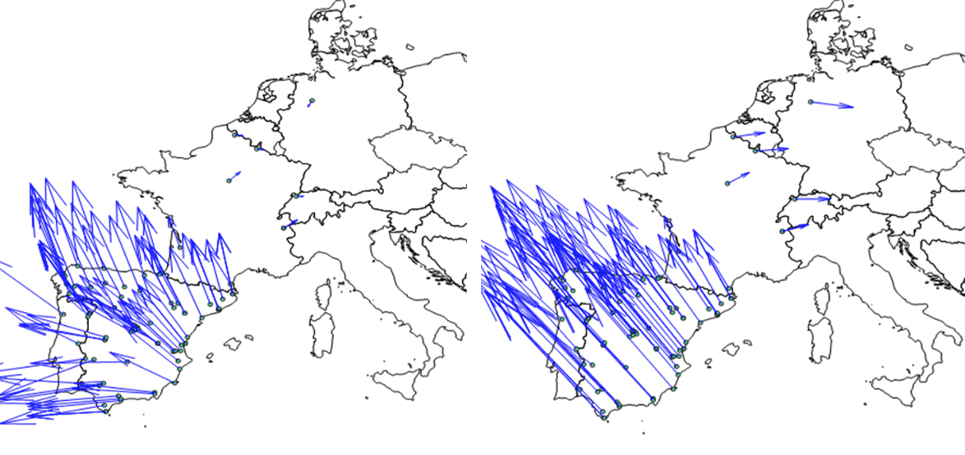
El apagón del 28 de abril de 2025 de las 12:33 que afectó a la península ibérica estuvo precedido de dos eventos previos de oscilaciones de baja frecuencia de 0,64 Hz y de 0,21 Hz, con una duración de unos cuatro minutos cada uno de ellos. Estos eventos, registrados tan solo unos minutos antes del apagón, guardan una relación directa con la evolución posterior del sistema eléctrico, si bien su consideración queda fuera del ámbito de este artículo.
El primer evento fue una oscilación local, o interna del sistema peninsular, en el que se crearon dos grupos de generadores, uno en el norte-este y un segundo grupo en el sur-oeste. Este evento pudo ser observable gracias a la información obtenida de los PMU al analizar el ángulo de fase en los nudos del sistema y observase cómo dichos ángulos oscilaban respecto de una posición intermedia. Estas oscilaciones de los ángulos son debidas a variaciones en la frecuencia de cada uno de los grupos de generadores y provocan también oscilaciones en los valores de las tensiones y de las potencias intercambiadas entre grupos de generadores.
El segundo evento fue una oscilación entre un área formada por el grupo de generadores de la península ibérica respecto de los generadores del resto de la red continental europea. Este tipo de oscilación se denomina inter-área o de área amplia.
En ambos casos, el operador del sistema tomó medidas para mitigar esas oscilaciones, si bien el sistema presentaba cierta inestabilidad en las tensiones. Primero fueron bajas, coincidiendo con las oscilaciones, y luego altas, lo que finalmente llevó al apagón, debido a múltiples factores, principalmente a un déficit de potencia reactiva capaz de realizar un control dinámico de las sobretensiones. En la figura 12, según informe [12], se representan los vectores de las tensiones medidos con PMU mostrando los ángulos de fase durante los dos fenómenos oscilatorios descritos.
Este ejemplo práctico pone de manifiesto la importancia de disponer de suficientes medidas fiables con PMU para un adecuado control y operación del sistema.
5. Conclusiones
La gestión de un sistema de potencia moderno es un desafío complejo que requiere una visibilidad completa y en tiempo real de su estado de operación. En primer lugar, los equipos de medida utilizados para conocer su estado, bien sean contadores, relés de protección o sincrofasores, deben conectarse en alta tensión, lo cual exige disponer de transformadores de tensión y de intensidad, o más modernamente, de sensores equivalentes, basados en otros principios de funcionamiento distinto del acoplamiento electromagnético, por ejemplo, de tipo óptico o divisores resistivos-capacitivos. Estos transformadores y sensores, que son imprescindibles en la cadena de medida, deben cumplir normas rigurosas, tener una exactitud suficiente para no deformar las señales que reciben los medidores de baja tensión y deben asegurar la trazabilidad metrológica de las mediciones. Con las medidas de tensiones y corrientes se pueden calcular otras magnitudes como la potencia eléctrica activa, reactiva y aparente, la frecuencia o la velocidad de variación de la frecuencia.
Los equipos de medida tradicionales, utilizados en baja tensión, cuyas mediciones se transmiten a los centros de control locales, si bien son eficaces en régimen permanente, operan con una velocidad de lectura lenta, en muchas ocasiones con lecturas cada 5 o 10 segundos. Esta limitación inherente resulta en una visión discontinua y fragmentada de la red, lo que dificulta la detección y control de eventos dinámicos con duraciones entre decenas de milisegundos hasta muy pocos segundos.
En el apagón del 28 de abril transcurrieron solamente 27 segundos entre las 12:32:57, entre los primeros disparos de generación en la región de Granada, y las 12:33:24, cuando todo el sistema peninsular colapsó (véase [12]). Esto evidencia la necesidad de una monitorización muy rápida capaz de operar de forma dinámica un conjunto muy extenso de sistemas de control, incluida la generación o absorción de reactiva. La tecnología de los PMU se desarrolló para cerrar esta brecha, proporcionando una vista de alta resolución del sistema de potencia en tiempo real mediante una rápida velocidad de lectura.
A diferencia de los fasores tradicionales, cuya referencia de fase es local y arbitraria, los sincrofasores incorporan una referencia de tiempo de alta exactitud, generalmente derivada de una señal GPS que es común para toda la red de PMU. Esta capacidad de monitorización sincronizada permite a los operadores de la red obtener una imagen integral y en tiempo real del estado del sistema, lo cual es esencial para el análisis de fenómenos dinámicos o transitorios rápidos que no pueden ser capturados por sistemas más lentos como son los relés de protección.
La tecnología sincrofasorial es crucial para aplicaciones avanzadas como la monitorización de área amplia (Wide-Area Measurement System o WAMS), la estimación de estado en tiempo real de todo el sistema y la gestión de su estabilidad. No obstante, la implementación a gran escala enfrenta desafíos críticos, especialmente en el manejo de los inmensos volúmenes de datos generados y en la mitigación de las vulnerabilidades de ciberseguridad.
La tecnología de los sincrofasores ha transformado la monitorización y control de los sistemas de potencia, ofreciendo una visibilidad y un nivel de detalle en tiempo real sin precedentes. La evolución y división de la familia de normas IEEE C37.118 en normas de medición y comunicación, junto con su armonización con IEC 61850, demuestra la madurez de la tecnología y el compromiso de la industria con la interoperabilidad global. La distinción entre las clases de exactitud P y M permite una optimización del hardware, asegurando que los equipos se adapten a las demandas específicas de velocidad para la protección o de exactitud para la medición.
Mirando hacia el futuro, los sincrofasores se posicionan como una tecnología indispensable para el desarrollo de redes inteligentes. La creciente complejidad del sistema de potencia, impulsada por la integración de la generación distribuida y las fuentes de energía renovable, hace que la visibilidad de área amplia y en tiempo real sea más importante que nunca. Sin embargo, para que se aproveche plenamente el potencial de esta tecnología, la industria debe abordar los desafíos críticos que enfrenta. El manejo de la explosión de datos requerirá continuas inversiones en infraestructura informática y redes de telecomunicaciones. Por otro lado, las vulnerabilidades de ciberseguridad inherentes al diseño del estándar de comunicación se deben mitigar mediante soluciones robustas ya que proteger la integridad de los datos es crucial para mantener la fiabilidad y la resiliencia de la red eléctrica del futuro.
Una prueba de la importancia de los sincrofasores para la operación del sistema eléctrico es que el proyecto de Real Decreto en tramitación para aprobar medidas urgentes para el refuerzo del sistema eléctrico prevé la necesidad de registros de faltas y perturbaciones del sistema que se almacenen de forma continua con un período de muestreo de al menos 20 ms (50 lecturas por segundo) y que tengan sincronización horaria, es decir, la ampliación del uso de los sincrofasores como una herramienta fundamental para la operación del sistema.
Bibliografía
[1] Directiva 2014/32/UE del Parlamento Europeo y del Consejo, de 26 de febrero de 2014, sobre la armonización de las legislaciones de los Estados miembros en materia de comercialización de instrumentos de medida.
[2] Real Decreto 1110/2007, de 24 de agosto, por el que se aprueba el Reglamento unificado de puntos de medida del sistema eléctrico.
[3] Orden TEC/1281/2019, de 19 de diciembre, por la que se aprueban las instrucciones técnicas complementarias al Reglamento unificado de puntos de medida del sistema eléctrico.
[4] Real Decreto 337/2014, de 9 de mayo, por el que se aprueban el Reglamento sobre condiciones técnicas y garantías de seguridad en instalaciones eléctricas de alta tensión y sus Instrucciones Técnicas Complementarias ITC-RAT 01 a 23.
[5] EN IEC 61869-1:2024. Transformadores de medida. Parte 1: Requisitos generales.
[6] UNE-EN 61869-2:2013. Transformadores de medida. Parte 2: Requisitos adicionales para los transformadores de intensidad.
[7] UNE-EN 61869-3:2012. Transformadores de medida. Parte 3: Requisitos adicionales para los transformadores de tensión inductivos
[8] UNE-EN 61869-4:2017. Transformadores de medida. Parte 4: Requisitos adicionales para transformadores combinados.
[9] UNE-EN 61869-5:2012. Transformadores de medida. Parte 5: Requisitos adicionales para los transformadores de tensión capacitivos.
[10] Explaining Power System Operation to Non engineers. May 2002. IEEE Power Engineering Review 22(4):25-27. DOI: 10.1109/MPER.2002.994846
[11] WESTENRA, HIIRONNIEMI. Flexible ac transmission systems.
CIGRE / Springer. ISBN 978-3-030-35385-8.
[12] Informe provisional de ENTSO-E. 28-april-2025-iberian-blackout. 28 April Blackout
[13] 60255-118-1-2018 – IEEE/IEC International Standard – Measuring relays and protection equipment – Part 118-1: Synchrophasor for power systems – Measurements.
[14] C37.118.2-2024 – IEEE Standard for Synchrophasor Data Transfer for Power Systems.






Comentarios